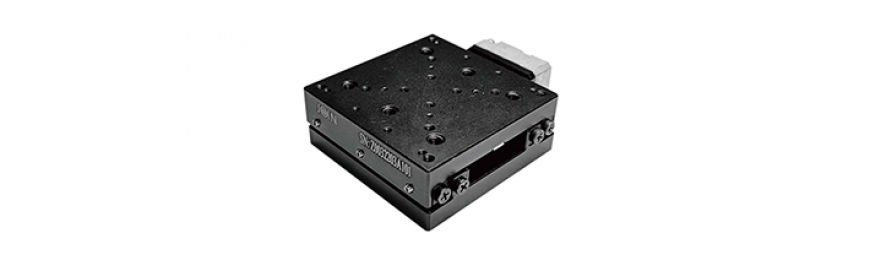

纳米位移台漂移与定位不稳原因及解决
纳米位移台在使用中常出现漂移、定位不准、来回偏差大等问题,多数与环境、安装、参数和维护有关。
定位缓慢漂移、越走越偏
原因:温度变化、未预热、电磁干扰、接地不良。
解决:保持环境恒温,开机预热,做好屏蔽与接地。
重复定位差、来回位置不一致
原因:导轨磨损、间隙偏大、安装松动、参数未优化。
解决:重新紧...
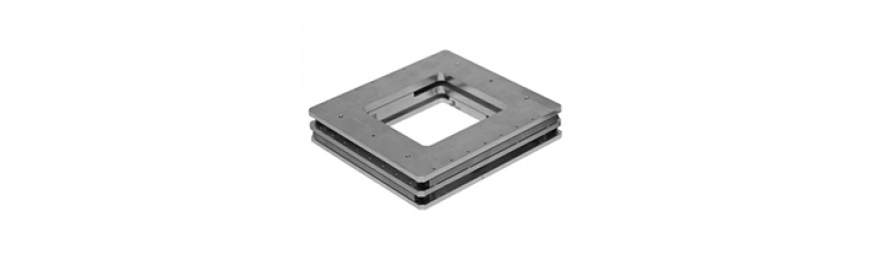
纳米位移台安装与调试注意事项
纳米位移台是实现高精度定位的核心部件,安装与调试是否规范,直接影响定位精度、运行稳定性和使用寿命。
安装平台需具备足够平面度与刚性,避免台面变形导致位移台受力不均,影响运动直线度和定位精度。固定螺丝要均匀锁紧,不可单边用力过大,防止机身扭曲。
接线时注意信号线与电源线分开布线,减少电磁干扰,避免定...
纳米位移台使用注意事项
纳米位移台是实现高精度定位和运动控制的关键部件,广泛用于精密检测、微纳操作、光学对准等场景。想要保证定位稳定、精度可靠,日常使用需要注意以下几点。
使用前要确保安装平面平整、干净,安装时均匀受力,避免强行固定导致平台变形。负载要在合理范围内,不可超重使用,否则会影响运动顺畅度和定位精度。
运动过程...

纳米位移台常见问题及解决方法
纳米位移台在使用中常会出现定位不准、漂移、卡顿、噪音、无响应等问题,多数可通过简单排查解决。
定位不准、偏差大
原因:安装不平、负载偏心、参数设置不当、环境振动或温度变化。
解决:重新校准安装平面,均匀负载,调整控制参数,保持环境稳定。
运动漂移、慢慢偏移
原因:温度漂移、系统未预热、接地不良、信号干...

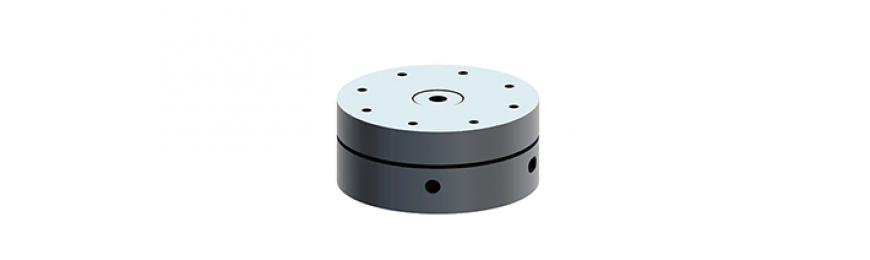
纳米位移台的应用场景及核心优势
纳米位移台是一种实现纳米级精准定位与位移控制的精密设备,核心作用是通过驱动机构带动负载完成微小距离的精准移动,凭借超高的定位精度、稳定的运行性能,成为工业生产中不可或缺的核心部件,广泛应用于各类对位移精度要求严苛的场景,助力提升设备整体精度与运行可靠性。
纳米位移台的核心优势十分突出,区别于普通位...

纳米位移台日常维护与常见故障处理
纳米位移台作为结构精密、技术复杂的高端定位设备,日常维护的规范性直接影响其定位精度、运行稳定性和使用寿命。很多用户在使用过程中,因维护不当、操作不规范,容易出现各类故障,影响工作效率,增加维护成本。下面整理了纳米位移台的日常维护技巧,拆解常见故障及简单处理方法,适配SEO传播需求,帮助用户规范维护、...